


匈牙利第一个学习型机器人诞生于 1957 年–看起来就像一只瓢虫!

變更語言:
。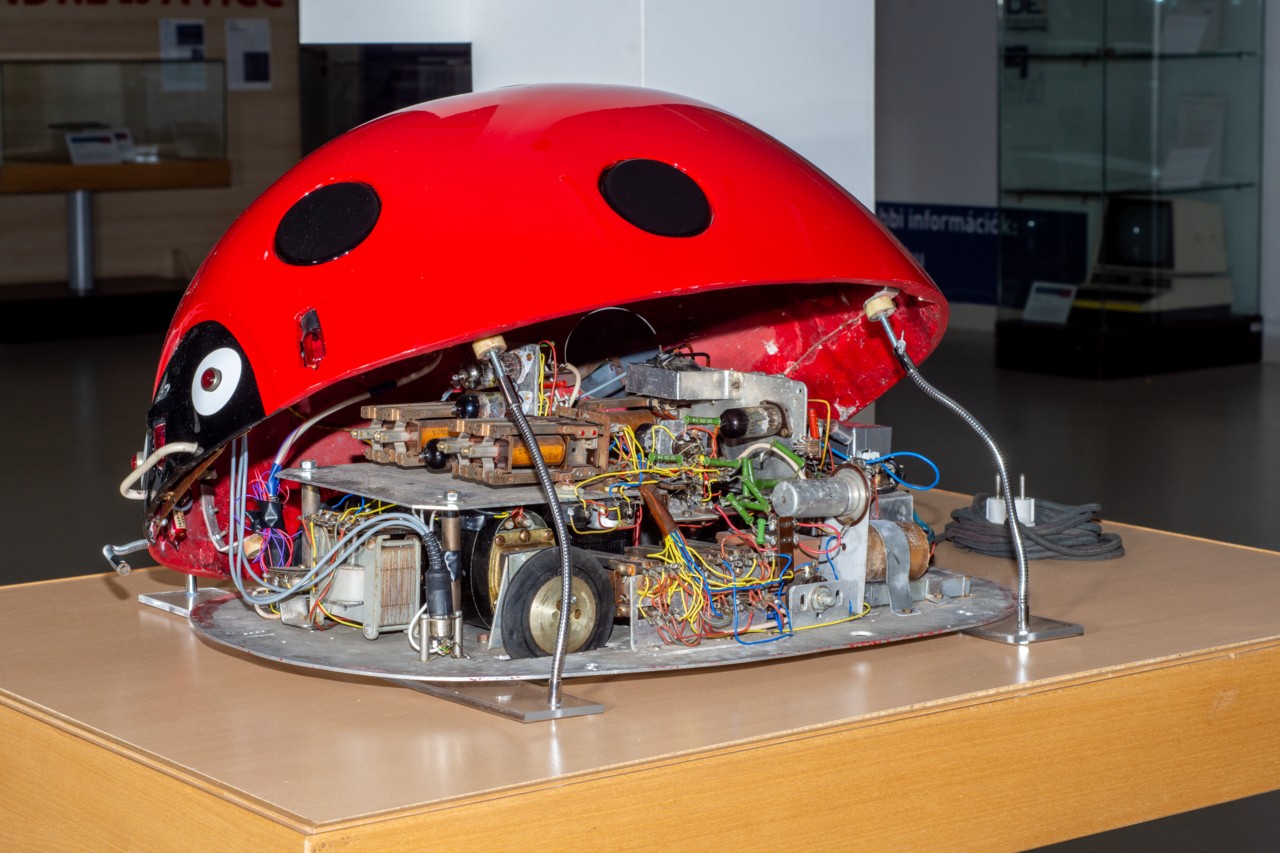
信息学历史展上的塞格德瓢虫最初的内部结构。图片Gábor Vid / Wikimedia Commons(CC BY-SA 4.0) 
塞格德瓢虫的原始标本。照片:Török DánielTörök Dániel / Wikimedia Commons, CC BY-SA 3.0
1957 年,Dániel Muszka 博士在匈牙利塞格德市开发出了一种非同寻常的东西:一种能对光线做出反应、从声音中学习并以其动作令旁观者着迷的机器人。这就是塞格德瓢虫,匈牙利第一个学习型机器人。
发明者
该机器人由塞格德大学研究员丹尼尔-穆斯卡博士于 1957 年发明。他的目标是证明机器可以学习,可以根据条件反射做出决定,或者至少表现得像可以。
它的设计确实很像瓢虫–红色的身体,黑色的斑点,用轮子代替了腿。它比一个中等大小的盒子大不了多少,但它所能做的事情在当时看来就像是科幻小说。
它能做什么?
乍一看,塞格德瓢虫就像一个玩具,但它却拥有令人惊讶的复杂能力。它具有三种类似感官的功能:能看、能听、能对触摸做出反应,甚至还能学习某些行为。
- 光探测:机器人配备了三个光电池,可以探测光线的方向。如果光照在中央,它就会向前移动;如果光照在一侧,它就会朝那个方向转动。两个重新利用的挡风玻璃雨刷电机为它的运动提供动力。
- 声音识别:通过内置麦克风,机器人可以对口哨等声音做出反应。起初,这只能触发它 “眼睛 “周围的灯光闪烁,但随着时间的推移,它开始将声音与运动指令联系起来。
- 触摸和行为:按压它的一个斑点会引发 “疼痛 “反应–它会发出哔哔的声音,并停止服从命令。但当它通过背上的一个特殊传感器 “抚摸 “它时,它最终又恢复了合作。
- 学习:也许它最显著的特点就是联想学习。如果一个声音与一个光提示持续配对,机器人最终会开始只对声音做出反应,就好像它已经 “学会 “了这个命令。
它为何如此特别?
塞格德瓢虫是匈牙利最早、最引人注目的控制论范例之一。在当时,控制论–控制和反馈科学–具有划时代的意义,而这个机器人则在实践中展示了这些概念。它的运行基于巴甫洛夫反射模型,这意味着机器可以将新的刺激(如声音)与旧的刺激(如光线)联系起来,并做出相应的反应。
瓢虫依靠继电器、光电池和简单的逻辑电路。它可以被视为现代人工智能或机器学习的早期模拟前身。虽然它并不像我们今天所理解的那样会 “思考”,但它的行为模仿了学习,在当时具有革命性意义。
瓢虫现在在哪里?
塞格德瓢虫不仅是技术上的奇迹,也是观众的最爱。20 世纪 60 年代,它曾在各种展览和科学活动中亮相,甚至还上过匈牙利电视台。这个小机器人很快成为匈牙利 “科学流行文化 “的一部分。
今天,您仍然可以看到最初的模型:它被塞格德信息学历史展览馆精心保存,有时甚至会在那里进行演示。人们还制作了几个功能性复制品;其中一个在 2011 年伦敦科学博物馆举办的 “机器人村 “展览中展出–对于一个有 60 多年历史的匈牙利制造的机器人来说,这是一个令人印象深刻的认可。
遗产和意义
虽然以今天的标准来看,这款机器人似乎很简单,但它的重要性怎么强调都不为过。塞格德瓢虫 “出现的时候,电脑已经占满了整个房间,”学习机器 “的概念还属于科幻小说。2018 年去世的 Dániel Muszka 不仅是一位天才工程师,也是匈牙利控制论的先驱之一。他的作品远远走在了时代的前列,以引人入胜、通俗易懂的方式向公众介绍了机器行为科学。
阅读或分享这篇文章的匈牙利语版本,请点击此处:匈牙利语
另请阅读: