Subscribe to our social channels to get the latest news about Hungary!



In 1957, Dr. Dániel Muszka developed something extraordinary in the Hungarian city of Szeged: a robot that responded to light, learned from sound, and mesmerised onlookers with its movements. This was the Szeged Ladybug, Hungary’s first learning robot.
The robot was created in 1957 by Dr. Dániel Muszka, a researcher at the University of Szeged. His goal was to demonstrate that machines could learn, make decisions based on reflexes, or at least behave as if they could.
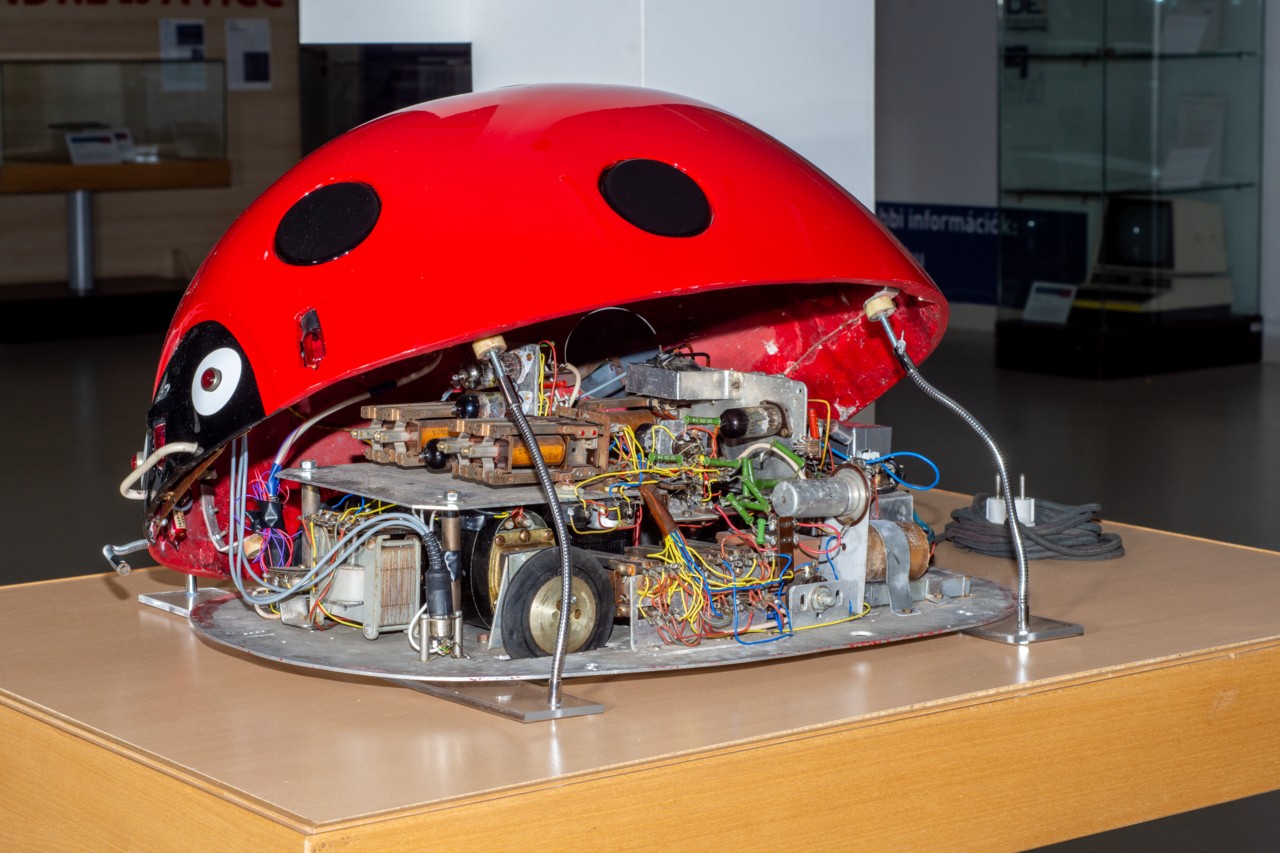
Its design really did resemble a ladybug—with a red body, black spots, and wheels instead of legs. It was no bigger than a medium-sized box, but what it could do seemed like science fiction at the time.
At first glance, the Szeged Ladybug looked like a toy, but it had surprisingly sophisticated abilities. It featured three sensory-like functions: it could see, hear, and respond to touch, and it could even learn certain behaviours.
The Szeged Ladybug was one of the earliest and most striking examples of cybernetics in Hungary. At the time, cybernetics—the science of control and feedback—was groundbreaking, and the robot demonstrated these concepts in practice. Its operation was based on the Pavlovian reflex model, meaning the machine could associate a new stimulus (like a sound) with an old one (like light) and react accordingly.

The Ladybug relied on relays, photocells, and a simple logic circuit. It can be seen as an early, analogue predecessor to modern artificial intelligence or machine learning. While it didn’t “think” in the way we understand today, its behaviour mimicked learning, making it revolutionary for its time.
The Szeged Ladybug wasn’t just a technical marvel; it was a crowd favourite, too. In the 1960s, it was featured at various exhibitions and scientific events, and even made appearances on Hungarian television. The little robot quickly became part of Hungary’s “scientific pop culture.”
You can still see the original model today: it’s carefully preserved by the Szeged Informatics History Exhibition, where it’s sometimes even demonstrated in action. Several functional replicas were also created; one of them was showcased at London’s Science Museum during its 2011 “Robotville” exhibition—an impressive recognition for a Hungarian-built robot more than 60 years old.
Though the robot may seem simple by today’s standards, its importance cannot be overstated. The Szeged Ladybug emerged at a time when computers filled entire rooms, and the notion of “learning machines” belonged to science fiction. Dániel Muszka, who passed away in 2018, was not only a gifted engineer but also one of the pioneers of Hungarian cybernetics. His work was far ahead of its time, introducing the science of machine behaviour to the public in an engaging and accessible way.
To read or share this article in Hungarian, click here: Helló Magyar
Read also:


